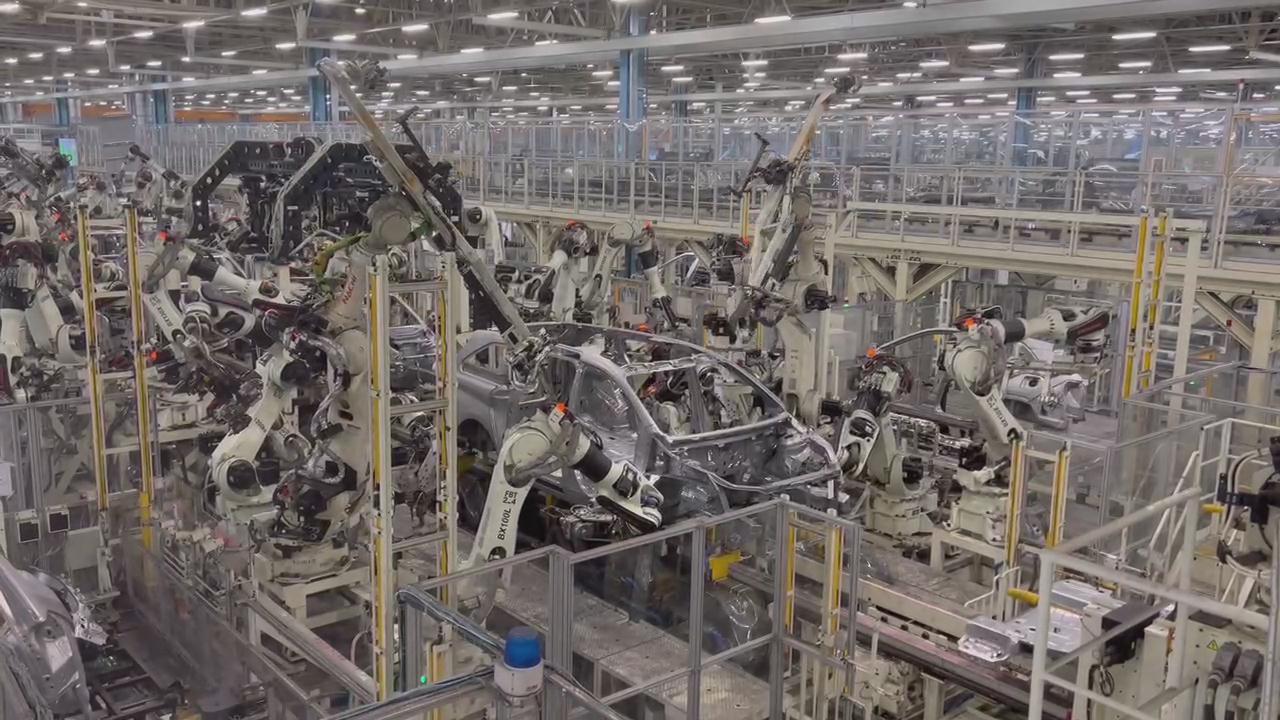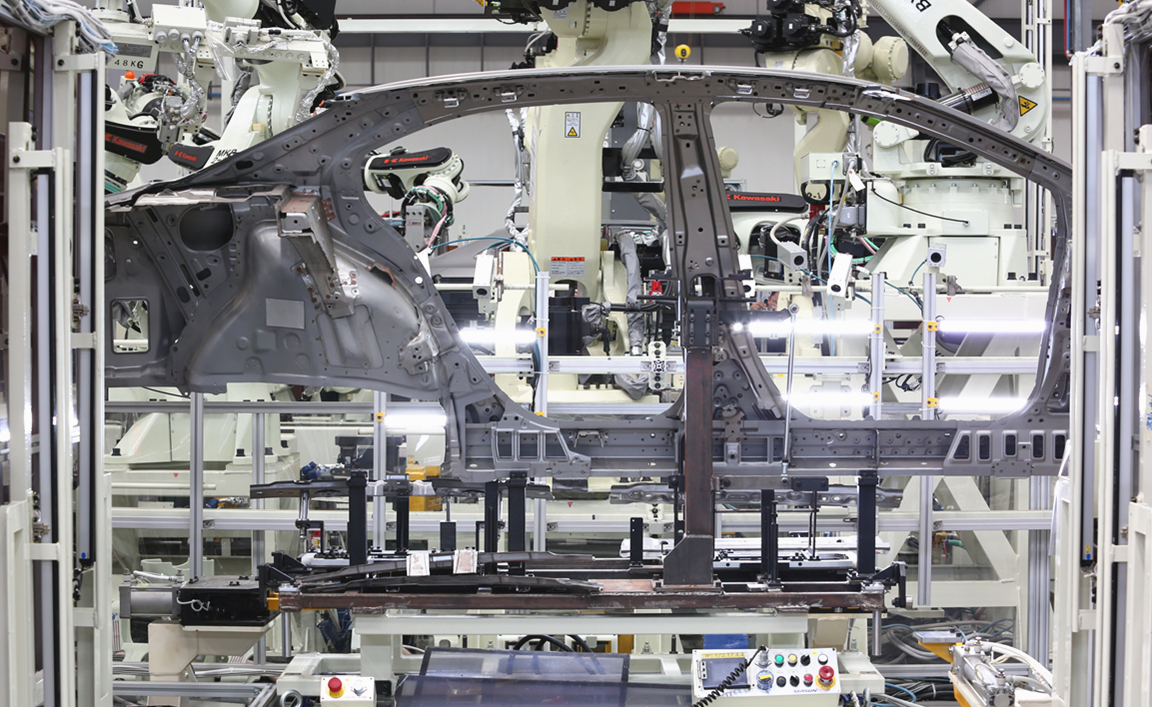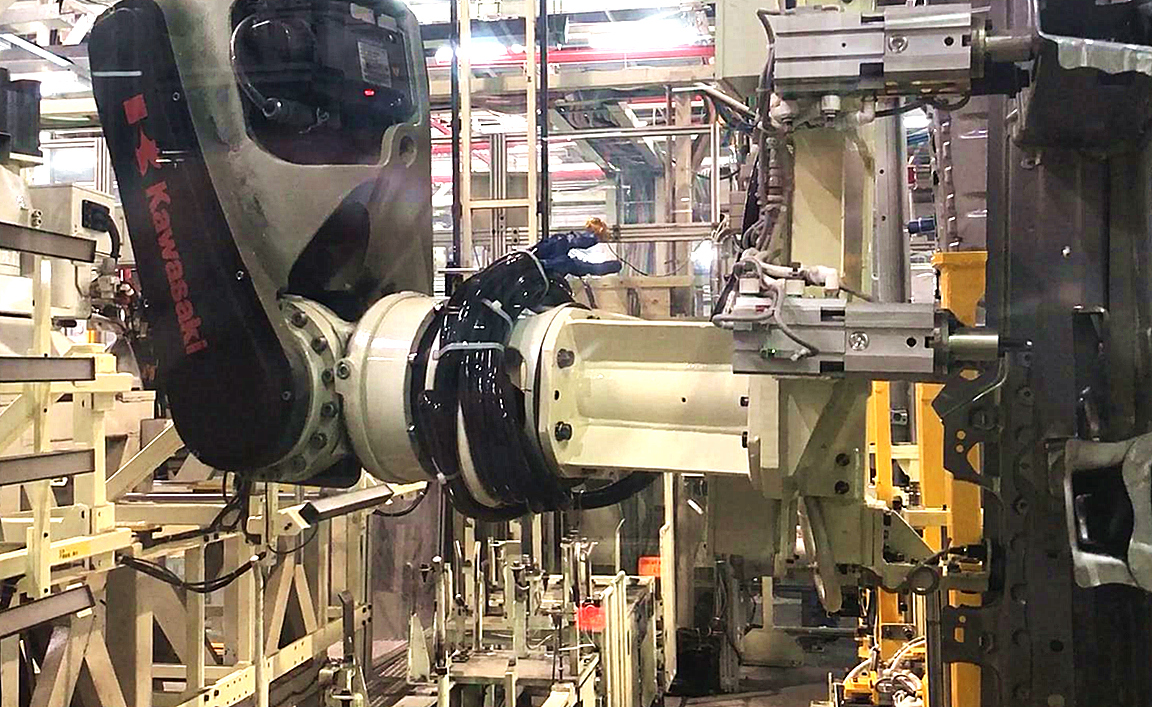


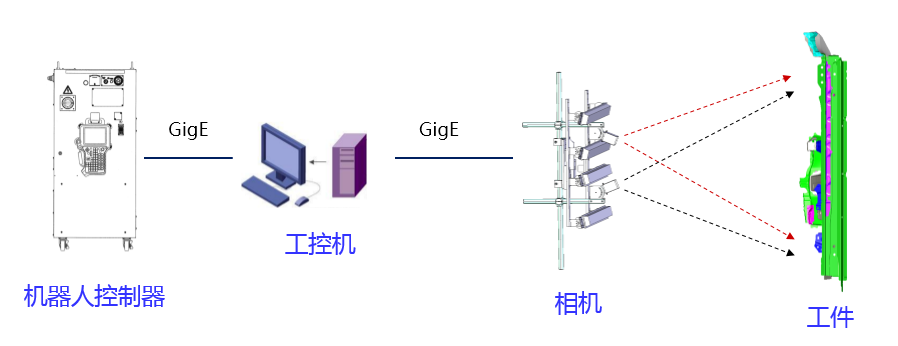
雙目視覺系統主要由兩組相機鏡頭、光源、圖像處理工控機組成,利用雙目視覺技術實現工件6自由度定位(X、Y、Z三個方向的位置和角度)并引導機器人糾偏后準確抓取,可廣泛應用于各類生產線物料搬運、裝配、上下料等。相機可固定安裝或者裝于機器人抓手,相機視野覆蓋全局,可擴展性強,易追加新車型。
視覺原理:
雙目立體視覺由兩(liang)臺相機從不同(tong)位姿(zi)采集工(gong)件(jian)圖(tu)像(xiang),基于工(gong)件(jian)上同(tong)一被測特征點所對應的圖(tu)像(xiang)視差(cha)來計算深度信(xin)(xin)息(xi),最后由多個被測點的三維位置信(xin)(xin)息(xi)計算出(chu)工(gong)件(jian)在(zai)空間(jian)上的位姿(zi)。